Hyundai Tucson: AverÃa y limitaciones del control de crucero inteligente / Limitaciones del control de crucero inteligente
Es posible que el control de crucero inteligente no funcione correctamente o que el control de crucero inteligente funcione de forma imprevista en las circunstancias siguientes:
- El sensor de detección o los alrededores están contaminados o dañados.
- Se rocÃa lÃquido lavaparabrisas de forma continua o el limpiaparabrisas está en funcionamiento.
- La lente de la cámara está contaminada porque el parabrisas se ha recubierto con una lámina tintada, una pelÃcula o un revestimiento, el cristal está roto o hay sustancias extrañas (adhesivos, insectos, etc.) adheridas al cristal.
- Hay humedad no eliminada o congelada en el parabrisas.
- El campo de visión de la cámara de visión frontal se oscurece por el brillo del sol.
- La luz del alumbrado público o de un vehÃculo que viene de frente se refleja sobre la superficie húmeda de la carretera, como un charco.
- La temperatura alrededor de la cámara de visión frontal es alta o baja.
- Se coloca un objeto sobre el salpicadero.
- Hay mucha luz en los alrededores.
- Hay poca luz en los alrededores, como en un túnel o similar.
- La luz cambia de repente, por ejemplo, al entrar o salir de un túnel.
- La luz exterior es escasa y los faros no están encendidos o dan poca luz.
- Se conduce con lluvia intensa o nieve, o con niebla espesa.
- Se conduce a través de vapor, humo o zonas con sombra.
- Solo se detecta una parte del vehÃculo.
- El vehÃculo que está delante no tiene luces traseras, las luces traseras están ubicadas de forma inusual, etc.
- La luz exterior es escasa y las luces traseras no están encendidas o dan poca luz.
- La parte trasera del vehÃculo que está delante es pequeña o tiene un aspecto anómalo (es decir, inclinada, volcada, etc.)
- El vehÃculo que está delante está muy separado del suelo o muy poco separado.
- Un vehÃculo se cuela por delante de forma repentina.
- Se está remolcando el vehÃculo.
- Se atraviesa un túnel o un puente de hierro.
- Se atraviesan áreas que contienen sustancias metálicas como zonas de construcción, vÃas férreas, etc.
- Hay un material próximo que se refleja muy bien el radar delantero, como un guardarraÃl, un vehÃculo cercano, etc.
- El parachoques ha sufrido un impacto o daños en la zona que rodea el radar o el radar delantero no está en su posición.
- La temperatura alrededor del radar delantero es alta o baja.
- Se conduce por áreas amplias donde haya pocos vehÃculos o estructuras (desierto, praderas, barrios residenciales, etc.).
- El vehÃculo que está delante está fabricado con un material que no se refleja en el radar frontal.
- Conduce cerca de una intersección de autovÃas (o autopistas) o atraviesa un peaje.
- Circula por una superficie deslizante debido a la presencia de nieve, charcos, hielo, etc.
- Conduce por una carretera con curvas.
- El vehÃculo que está delante se detecta tarde.
- El vehÃculo que está delante queda bloqueado de repente por un obstáculo.
- El vehÃculo que está delante cambia de repente de carril o reduce bruscamente la velocidad.
- El vehÃculo que está delante está deformado.
- La velocidad del vehÃculo que está delante es rápida o lenta.
- Con un vehÃculo por delante, su vehÃculo cambia de carril a baja velocidad.
- El vehÃculo que está delante está cubierto de nieve.
- Conducción inestable
- Pasa por una rotonda y no se detecta el vehÃculo que está delante.
- Traza cÃrculos de forma continuada.
- Circula por un estacionamiento.
- Atraviesa un área de construcción, una carretera sin pavimentar, una carretera parcialmente pavimentada, una carretera irregular, badenes, etc.
- Circula por una carretera en pendiente, una carretera con curvas, etc.
- Circula por una carretera con árboles o farolas en los laterales.
- Las condiciones adversas de la calzada pueden provocar vibraciones excesivas del vehÃculo durante la conducción.
- La altura de su vehÃculo es alta o baja debido a una carga pesada, por una presión incorrecta de los neumáticos, etc.
- Circula por una carretera estrecha con árboles, hierba o maleza.
- Hay interferencias de ondas electromagnéticas, como al conducir por un área con potentes ondas de radio o ruido eléctrico.
• Conducción en una curva
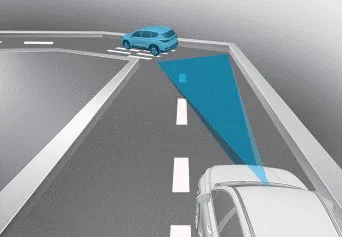
En curvas, es posible que el control de crucero inteligente no detecte un vehÃculo que esté en el mismo carril y es posible que acelere hasta la velocidad fijada. Además, la velocidad del vehÃculo puede reducirse rápidamente cuando se detecte el vehÃculo que está delante de forma repentina.
Seleccione la velocidad adecuada en curvas y accione el pedal del freno o del acelerador según las condiciones de la carretera y de la conducción.
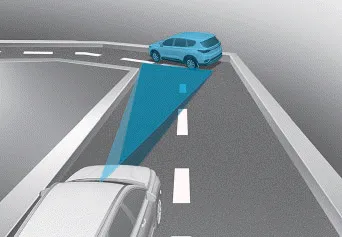
La velocidad de su vehÃculo puede verse reducida debido a que hay un vehÃculo en el carril adyacente.
Pise el acelerador y seleccione la velocidad fijada adecuada. Verifique que las condiciones de la carretera permitan el funcionamiento seguro del control de crucero inteligente.
• Conducción por una pendiente
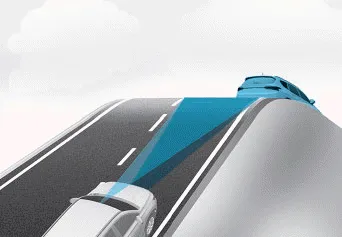
Al subir o bajar una pendiente, es posible que el control de crucero inteligente no detecte un vehÃculo que se desplaza en su carril y provocar que su vehÃculo acelere hasta la velocidad definida. Además, la velocidad del vehÃculo se reducirá rápidamente cuando se detecte el vehÃculo que está delante de forma repentina.
Seleccione la velocidad adecuada en pendientes y accione el pedal del freno o del acelerador según las condiciones de la carretera y de la conducción.
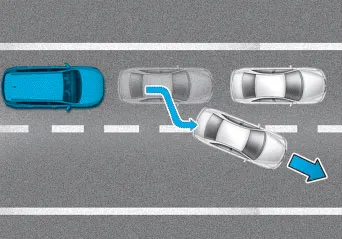
• Cambio de carril
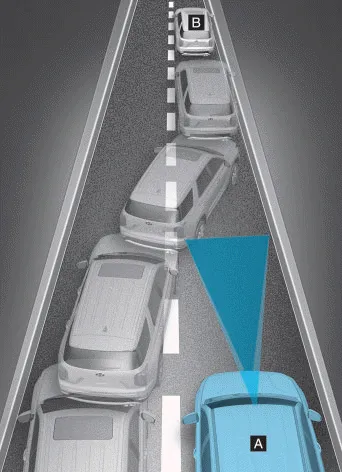
[A]: su vehÃculo, [B]: vehÃculo cambiando de carril
El sensor no puede detectar un vehÃculo que entre en su carril desde un carril adyacente hasta que esté dentro del margen de detección del sensor. El control de crucero inteligente podrÃa no detectar inmediatamente el vehÃculo si este cambia de carril de forma repentina. En este caso, debe mantener una distancia segura de frenado y, si es necesario, pise el pedal del freno para reducir la velocidad de conducción para mantener una distancia segura.
• Detección de vehÃculos
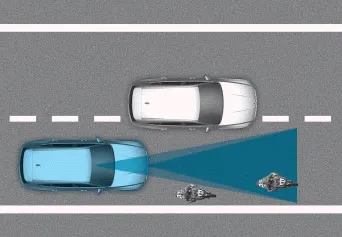
En los casos siguientes, algunos vehÃculos en su carril podrÃan no ser detectados por el sensor:
- VehÃculos desplazados hacia un
lado
- VehÃculos lentos o vehÃculos que
frenan bruscamente
- VehÃculos que vienen de frente
- VehÃculos parados
- VehÃculos con perfil trasero
reducido como remolques
- VehÃculos estrechos como motos o
bicicletas
- VehÃculos especiales
- Animales y peatones
Ajuste la velocidad de su vehÃculo pisando el freno según el estado de la carretera y las condiciones del tráfico.
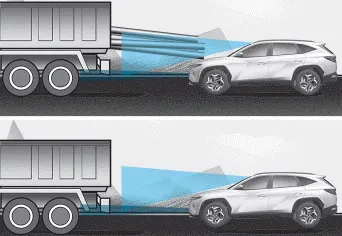
En los casos siguientes, el vehÃculo que le precede podrÃa no ser detectado por el sensor:
- VehÃculos con mayor separación del
suelo o vehÃculos que transporten
cargas que sobresalen de la parte
trasera del vehÃculo
- VehÃculos que tengan la parte
frontal levantada debido a cargas
pesadas
- Está girando su vehÃculo
- Conduce por carreteras estrechas o
con curvas pronunciadas
Ajuste la velocidad de su vehÃculo pisando el freno según el estado de la carretera y las condiciones del tráfico.
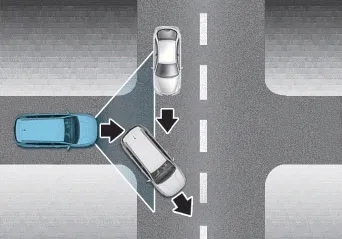
• Cuando el vehÃculo que va delante desaparece en una intersección, su vehÃculo podrÃa acelerar.
Preste siempre atención a la carretera y a las condiciones de la conducción.
• Si el vehÃculo que está delante abandona el carril, el control de crucero inteligente puede no detectar inmediatamente el nuevo vehÃculo que ahora lo precede.
Preste siempre atención a la carretera y a las condiciones de la conducción.
• Preste atención a la presencia de peatones cuando su vehÃculo mantenga una distancia determinada con respecto al vehÃculo que le precede.
 Control de crucero inteligente
desactivado
Control de crucero inteligente
desactivado
Si la cubierta del radar frontal o el
sensor están cubiertos de nieve, lluvia
o sustancias extrañas, puede reducirse
el rendimiento de detección y limitarse
temporalmente o desactivarse el co ...
 Control de crucero inteligente basado en la navegación (NSCC)
Control de crucero inteligente basado en la navegación (NSCC)
El control de crucero inteligente
basado en la navegación ayudará a
conducir a una velocidad de seguridad
adecuada a las condiciones de la
calzada cuando conduzca en autopistas
(o autovÃas) me ...
Otra informacion:
Hyundai Tucson (NX4) Manual del propietario: Para aumentar la velocidad
Empuje el interruptor + hacia arriba
y suéltelo inmediatamente. La
velocidad de crucero aumenta 1 km/h
(1 mph) cada vez que se acciona el
interruptor de esta manera.
Empuje el interruptor + hacia arriba
y manténgalo asà mientras controla
la velocidad fijada en el tablero. La
ve ...
Hyundai Tucson (NX4) Manual del propietario: Gestión de estabilidad del
vehÃculo (VSM)
La gestión de estabilidad del vehÃculo
es una función del sistema de control
electrónico de estabilidad (ESC).
Contribuye a mantener la estabilidad
del vehÃculo en caso de aceleración o
frenada brusca en calzadas mojadas,
deslizantes o irregulares, en las que la
tracción en las cuatro ...
